In classical mechanics, many physical quantities are not just about “how much” but also about “which direction.” That’s where vectors come in.
Vector representation allows physicists to describe motion, forces, and fields accurately by including both magnitude and direction. Without vectors, understanding real-world motion—from projectiles to planetary orbits—would be incomplete.
Let’s explore how vectors work and why they are essential in classical mechanics.
What Is a Vector?
A vector is a quantity that has:
- Magnitude (size or amount)
- Direction
This makes vectors different from scalars, which only have magnitude.
Examples of Scalars
- Mass
- Temperature
- Time
- Speed
Examples of Vectors
- Displacement
- Velocity
- Acceleration
- Force
For example, saying “10 meters” is incomplete. But saying “10 meters north” provides full information—that’s a vector.
Why Vectors Matter in Classical Mechanics
Classical mechanics deals with motion and forces. Most of these quantities depend on direction.
Vectors allow us to:
- Describe motion in multiple dimensions
- Combine forces acting in different directions
- Predict trajectories
- Analyze equilibrium conditions
Without vector representation, Newton’s laws would not work correctly in two or three dimensions.
Graphical Representation of Vectors
Vectors are often represented graphically as arrows.
The arrow shows:
- Length → magnitude
- Arrowhead → direction
For example:
- A longer arrow represents a stronger force.
- A shorter arrow represents a smaller force.
When drawn on coordinate axes, vectors can show horizontal, vertical, or angled directions.
Components of a Vector
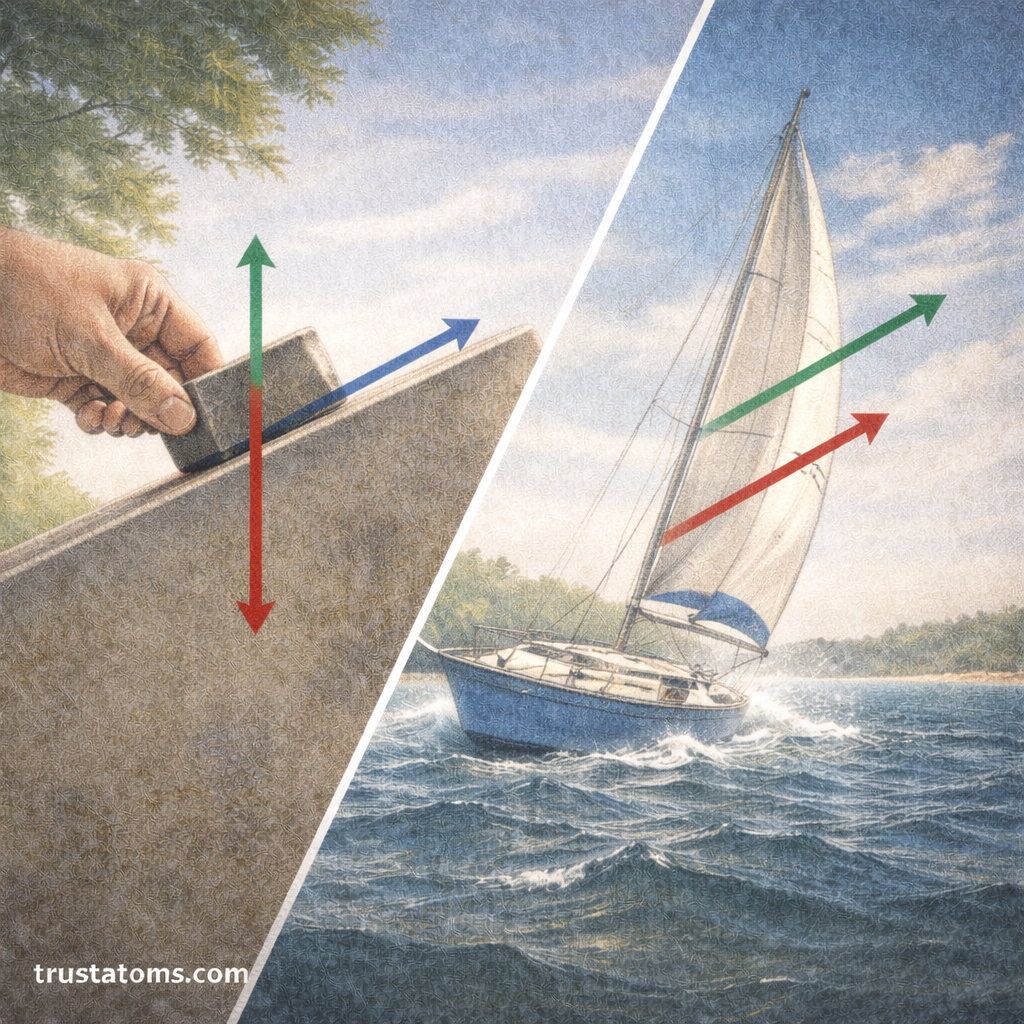
In two or three dimensions, vectors are often broken into components.
For example:
- A force acting diagonally can be split into
- A horizontal component
- A vertical component
This makes calculations easier because each component can be analyzed separately.
In rectangular coordinates:
- Horizontal direction → x-component
- Vertical direction → y-component
- Depth direction (in 3D) → z-component
Breaking vectors into components is fundamental for solving mechanics problems.
Vector Addition in Mechanics
Objects often experience multiple forces at the same time.
To find the total or net force, we use vector addition.
Methods of Vector Addition
- Head-to-tail method
- Parallelogram method
- Component method
The component method is most common in physics because it simplifies calculations.
For example:
- If two forces act in opposite directions, the net force is the difference.
- If they act at angles, components must be combined carefully.
Vector addition determines how objects accelerate under multiple forces.
Unit Vectors
A unit vector has a magnitude of 1 and shows direction only.
Unit vectors are useful for:
- Indicating direction clearly
- Writing vectors in compact mathematical form
In Cartesian coordinates, special unit vectors represent standard directions along each axis.
These allow vectors to be written neatly and consistently.
Vector Representation of Motion
In classical mechanics, motion is described using vector quantities.
Displacement
Displacement is a vector because it describes:
- Change in position
- Direction from start to finish
Velocity
Velocity is the rate of change of displacement.
It tells us:
- How fast something moves
- In which direction
Acceleration
Acceleration describes how velocity changes over time.
It also has direction.
For example:
- Circular motion involves acceleration toward the center, even if speed stays constant.
Vector Representation of Forces
Newton’s Second Law relies entirely on vectors.
Force is a vector because:
- It has magnitude (strength)
- It has direction (push or pull direction)
When multiple forces act on an object:
- They must be added as vectors
- The net force determines acceleration
This is why free-body diagrams are essential tools in mechanics.
Vectors in Two and Three Dimensions
Real-world motion rarely happens in a straight line.
Vectors allow us to analyze:
- Projectile motion
- Circular motion
- Planetary motion
- Rotational dynamics
In two dimensions:
- Motion is often separated into horizontal and vertical components.
In three dimensions:
- Motion includes depth and spatial orientation.
Vector representation makes multidimensional analysis possible.
Advantages of Using Vectors in Physics
Vector representation provides:
- Precision in describing motion
- Clear visualization of direction
- Mathematical simplicity in solving problems
- Consistency across physical laws
Nearly every major equation in classical mechanics uses vectors.
They are the language of motion.
Key Takeaways
Vector representation in classical mechanics allows physicists to describe quantities that have both magnitude and direction.
Important points:
- Vectors differ from scalars because they include direction.
- Graphical arrows represent vectors visually.
- Components simplify calculations.
- Vector addition determines net force.
- Motion and forces in physics rely heavily on vector analysis.
Understanding vectors is essential before mastering advanced mechanics topics such as rotational motion, fields, and electromagnetism.
Related Posts
 What Is Electric Current?
What Is Electric Current? Higgs Mechanism in Mass Generation
Higgs Mechanism in Mass Generation Elastic vs Inelastic Collisions
Elastic vs Inelastic Collisions What Is Thermal Expansion?
What Is Thermal Expansion?